|
iSAM
|


|
|
iSAM
|
|
#include <Slam.h>
Public Member Functions | |
| Slam () | |
| virtual | ~Slam () |
| Properties | properties () |
| void | set_properties (Properties prop) |
| void | save (const std::string fname) const |
| void | add_node (Node *node) |
| void | add_factor (Factor *factor) |
| void | remove_node (Node *node) |
| void | remove_factor (Factor *factor) |
| virtual UpdateStats | update () |
| virtual int | batch_optimization () |
| void | set_cost_function (cost_func_t cost_func) |
| double | normalized_chi2 () |
| double | local_chi2 (int last_n) |
| Eigen::VectorXd | weighted_errors (Selector s=ESTIMATE) |
| double | chi2 (Selector s=ESTIMATE) |
| virtual const SparseSystem & | get_R () const |
| virtual SparseSystem | jacobian_numerical_columnwise () |
| virtual SparseSystem | jacobian_partial (int last_n) |
| virtual SparseSystem | jacobian () |
| const Covariances & | covariances () |
| virtual void | print_stats () |
Protected Attributes | |
| int | _dim_nodes |
| int | _dim_measure |
| int | _num_new_measurements |
| int | _num_new_rows |
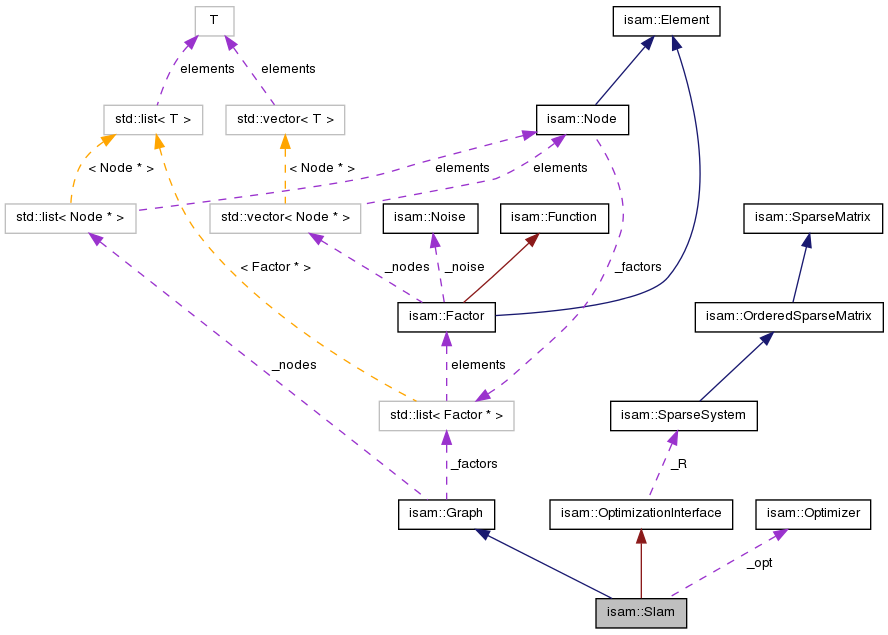
| Optimizer | _opt |
Friends | |
| class | Covariances |
| isam::Slam::Slam | ( | ) |
| isam::Slam::~Slam | ( | ) | [virtual] |
| void isam::Slam::add_factor | ( | Factor * | factor | ) | [virtual] |
Adds a factor (measurement) to the graph.
| factor | Pointer to new factor. |
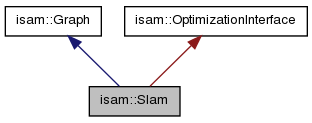
Reimplemented from isam::Graph.
| void isam::Slam::add_node | ( | Node * | node | ) | [virtual] |
Adds a node (variable) to the graph.
| node | Pointer to new node. |
Reimplemented from isam::Graph.
| int isam::Slam::batch_optimization | ( | ) | [virtual] |
| double isam::Slam::chi2 | ( | Selector | s = ESTIMATE | ) |
| const Covariances & isam::Slam::covariances | ( | ) |
Returns the Covariances object associated with this Slam object.
| const SparseSystem & isam::Slam::get_R | ( | ) | const [virtual] |
| SparseSystem isam::Slam::jacobian | ( | ) | [virtual] |
Returns the measurement Jacobian of the SLAM system.
Implements isam::OptimizationInterface.
| SparseSystem isam::Slam::jacobian_numerical_columnwise | ( | ) | [virtual] |
| SparseSystem isam::Slam::jacobian_partial | ( | int | last_n | ) | [virtual] |
| double isam::Slam::local_chi2 | ( | int | last_n | ) |
| double isam::Slam::normalized_chi2 | ( | ) |
| void isam::Slam::print_stats | ( | ) | [virtual] |
| Properties isam::Slam::properties | ( | ) | [inline] |
| void isam::Slam::remove_factor | ( | Factor * | factor | ) | [virtual] |
Removes an factor (measurement) from the graph. Note that the factor itself is not deallocated. Be careful not to leave unconnected nodes behind.
| factor | Pointer to factor. |
Reimplemented from isam::Graph.
| void isam::Slam::remove_node | ( | Node * | node | ) | [virtual] |
Removes a node (variable) and all adjacent factors from the graph. Note that the node itself is not deallocated.
| node | Pointer to node. |
Reimplemented from isam::Graph.
| void isam::Slam::save | ( | const std::string | fname | ) | const |
| void isam::Slam::set_cost_function | ( | cost_func_t | cost_func | ) |
| void isam::Slam::set_properties | ( | Properties | prop | ) | [inline] |
| UpdateStats isam::Slam::update | ( | ) | [virtual] |
| VectorXd isam::Slam::weighted_errors | ( | Selector | s = ESTIMATE | ) | [virtual] |
Weighted non-squared error vector, by default at current estimate.
Implements isam::OptimizationInterface.
 1.7.6.1
1.7.6.1