Estimating contact force and torque with GelSight
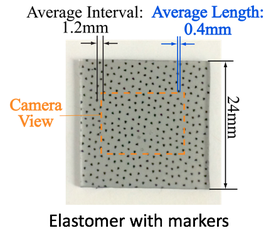
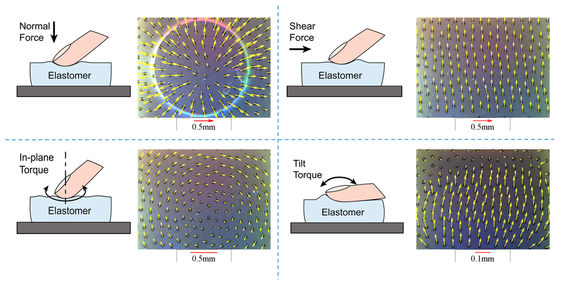
In this project, we paint markers on the GelSight surface and track their planar displacement in the image. We found that the marker displacement represents the contact force. On one hand, the pattern of the movement field is related to the force type; on the other hand, the magnitude of the displacement is in the portion to the force magnitude. The markers are very sensitive to small forces.
|
|
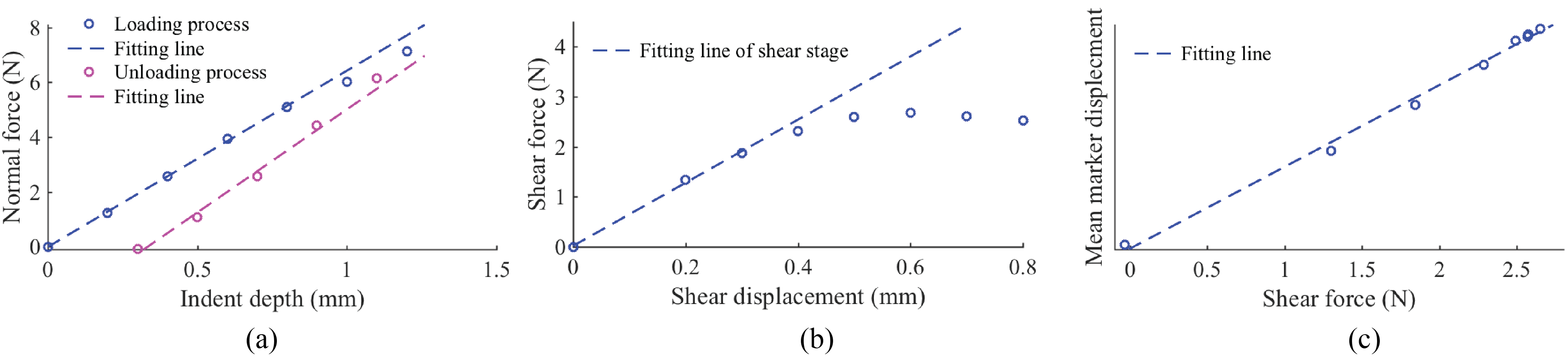
Under the simple contact condition, the deformation of the elastomer on GelSight is to the linear relationship to the contact force, as shown in the following figure. The 'simple' condition means, the contact shape remains constant, and only considering the quasi-static conditions. The motion magnitude of the markers precisely denotes the deformation magnitute of the elastomer in the x-y plane.
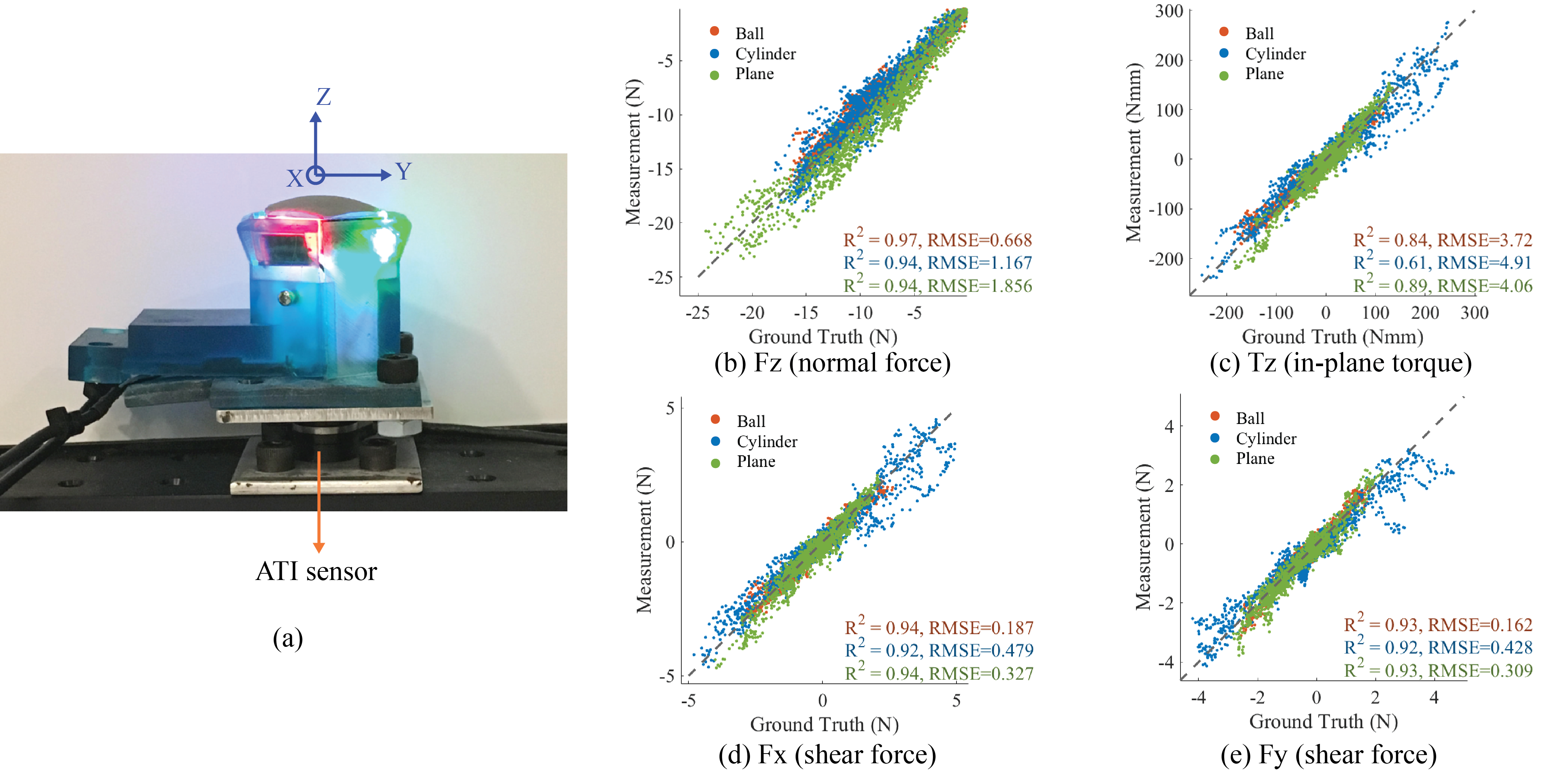
In reality, the correlation between the sensor deformation magnitute and the contact force and torque is highly related to the contact geometry, and is hard to measure. Additionally, for the fingertip tactile sensor, where a curved shaped contact surface is preferred, the force is harder to measure. We use Convolutional Neural Networks (CNN) to measure the force and in-plane torque with a fingertip GelSight sensor, as shown in the following figure. The sensor has a domed shaped surface, and we use an ATI Nano-17 force/torque sensor to calibrate the contact force. In the training set, we used indenters of different shapes to contact the GelSight sensors with different forces and torques, and test the force/torque measurement on the tactile sequence of contacting other indenters. The following graphs show the result, and the measured force/torque values highly correlate to the ground truth.