Fast Localization and Tracking using Event Sensors
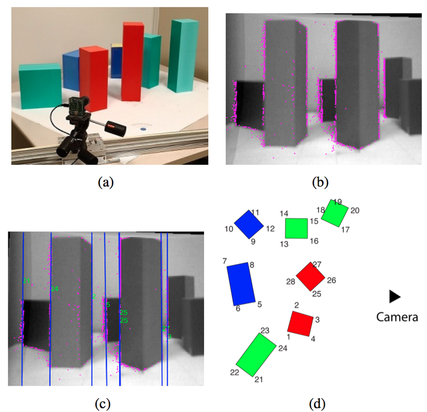
We use an event sensor for high-speed localization in simple artificial scenes. Compared to the traditional cameras that records intensity of an image, the event sensor reads `events'-- the intensity change of the pixels in the image, but in a very high speed. Event sensors are good at detecting motion, when edges will evoke many events. In this project, we use the events to track the borders in the scene-- especially the vertical lines because they are common in artificial scenes, and match them with the map.
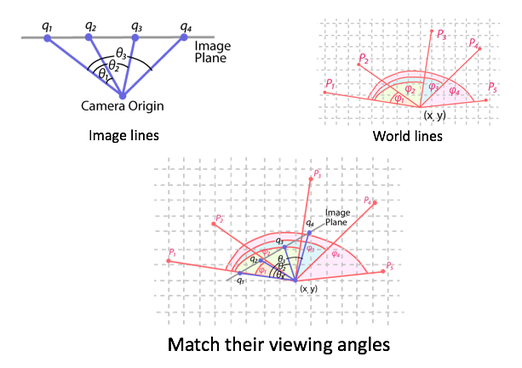
A major challenge for this task is speed: we wish to make the system to do localization for 1000Hz or higher. We developed many algorithms to speed the system, including using IMU information to rotate the image thus extracting the vertical lines quicker, and using `viewing angles' to match the correspondence of the lines in the image and lines in the map. The following figure introduce how the `viewing angle' method works:
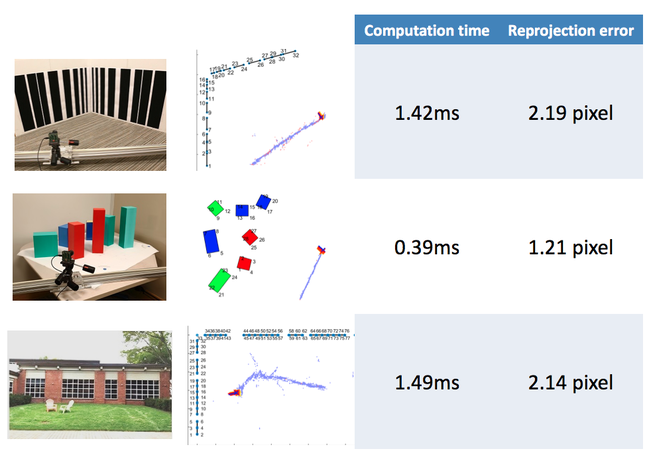
We test the method in 2 man-made scenes and a field scene.