#include <glc.h>
List of all members.
Public Member Functions |
| | GLC_Factor (std::vector< Node * > nodes, const Eigen::VectorXd &x, const Eigen::MatrixXd &G, GLC_Reparam *rp=NULL) |
|
void | initialize () |
|
Jacobian | jacobian () |
|
Eigen::VectorXd | basic_error (Selector s=LINPOINT) const |
|
void | write (std::ostream &out) const |
Public Attributes |
|
const Eigen::VectorXd | _x |
|
const Eigen::MatrixXd | _G |
|
GLC_Reparam * | _rp |
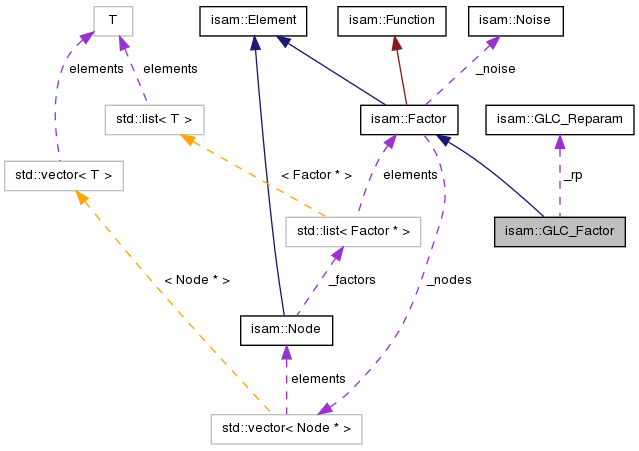
Detailed Description
Generic Linear Constraint
Definition at line 78 of file glc.h.
Constructor & Destructor Documentation
Constructor.
- Parameters:
-
| poses | Vector of Pose3d_Node pointers which support the factor |
| x | The state vector used as the linearization point for the GLC |
| G | The PCA transformation calculated from the target information |
| rp | Reparametrization object, uses to implement root-shift or user defined reparameterizations to be applied before commiting to a linearization point |
Definition at line 93 of file glc.h.
The documentation for this class was generated from the following file:


 1.7.6.1
1.7.6.1