Noam BuckmanI received my PhD from MIT in 2023 focusing on robotics and autonomous vehicles. I was co-advised by Professors Daniela Rus and Sertac Karaman. My research was funded by the National Defense Science & Engineering Graduate Fellowship and the Toyota Research Institute. Prior to my PhD, I received a B.S. (2016) and M.S. (2018) in Mechanical Engineering and Mathematics from MIT. Email / GitHub / Google Scholar / LinkedIn |

|
|
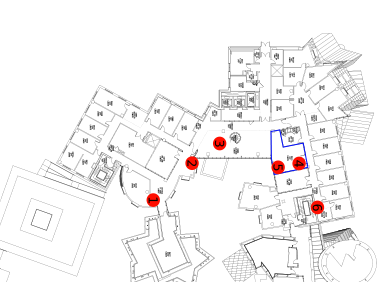
My research focuses on making autonomous vehicles that can safely interact with human drivers on the road by incorporating models of human devision making into the vehicle's autonomy. I also led the MiniCity project, a 1/10th scale miniature city and autonomous vehicles, and organized the IROS 2022 Workshop on Miniature Robot Platforms for Full-Scale Autonomous Vehicle Research.
|
Recent News |
| Mar '23: | MIT CSAIL video on our upcoming ICRA '23 work, FailureNet, for detecting failures in AVs and reckless drivers. |
| Feb '23: | MiniCity gets featured on Mashable and MIT CSAIL's Instagram. |
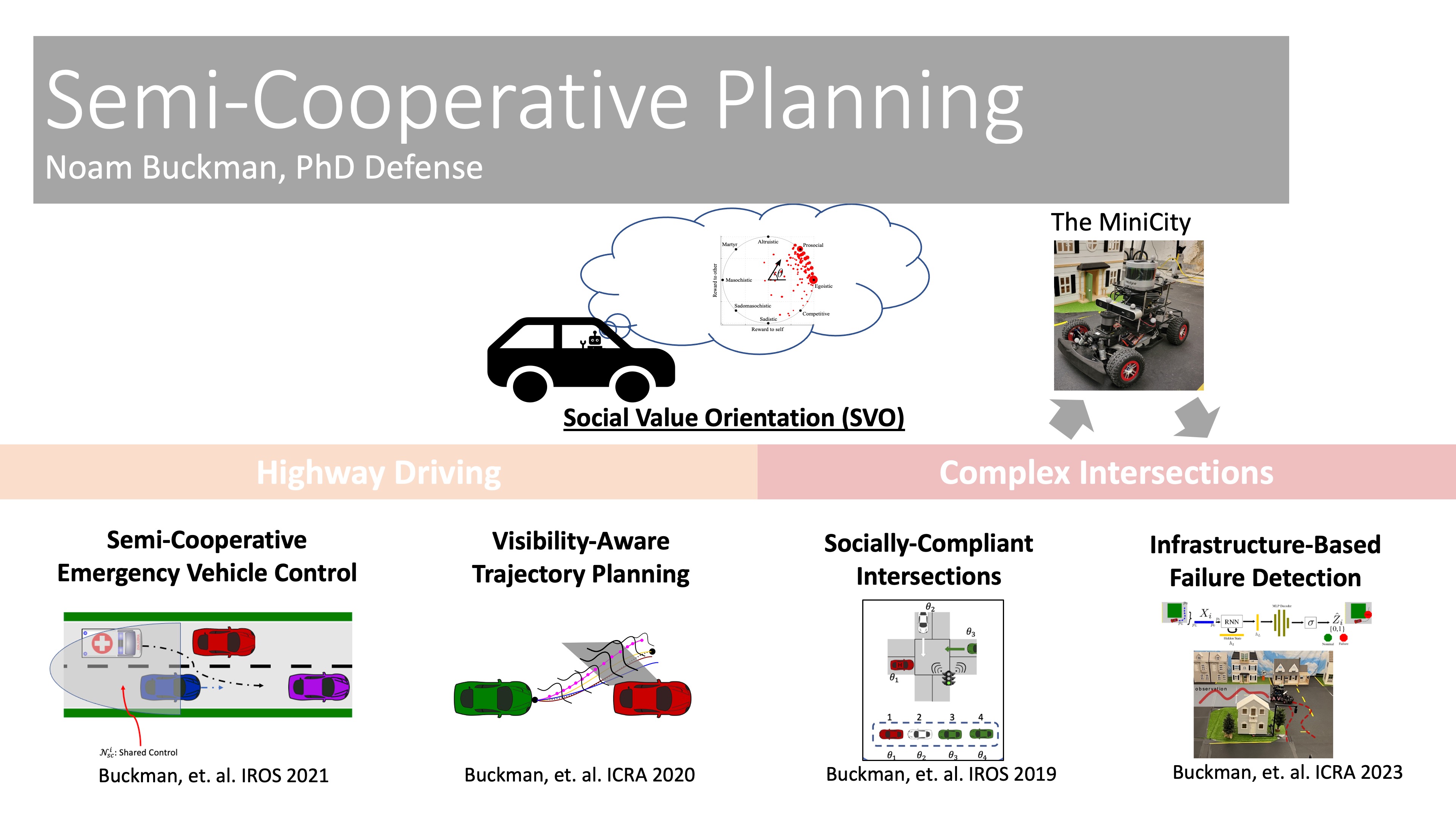
| Jan '23: | I successfully defended my PhD thesis "Semi-Cooperative Planning for Mixed Human-Autonomous Environments"! A recording of the talk can be found here |
| Jan '23: | Our recent work on infrastructure-based failure detection was accepted at ICRA 2023! |
| Nov '22: | Presented our poster on FailureNet at NeurIPS Workshop on Robot Learning |
| Oct '22: | Co-organized the Workshop on Miniature Robot Platforms for Full Scale Autonomous Vehicle Research at IROS 2022 |
| May '22: | Presented our work on shared intersection control in the MiniCity at ICRA SAPHRI 2022 |
Research |
|
Infrastructure-based End-to-End Learning and Prevention of Driver FailureNoam Buckman*, Shiva Sreeram*, Mathias Lechner, Yutong Ban, Ramin Hasani, Sertac Karaman, Daniela RusIEEE International Conference on Robotics and Automation (ICRA) (accepted), 2023 paper / video / |
|
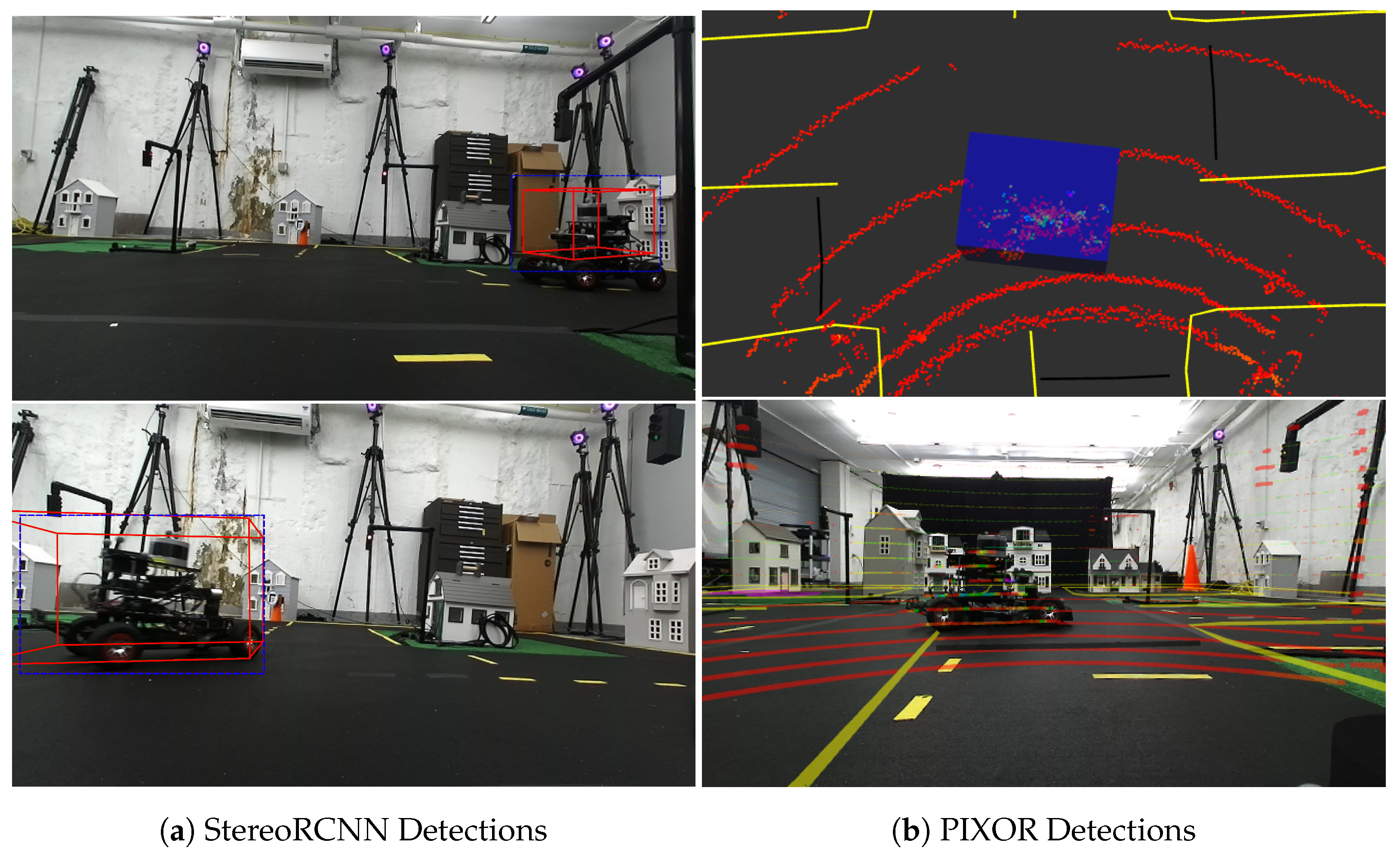
Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity.Noam Buckman, Alex Hansen, Sertac Karaman, Daniela RusSensors, 2022 paper / |

|
Sharing Intersection Control with Human Drivers in a 1/10th Scale Miniature CityNoam Buckman, Alex Hansen, Sertac Karaman, Daniela RusIEEE International Conference on Robotics and Automation (ICRA) Workshop on 'Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust', 2022 |
|
Semi-Cooperative Control for Autonomous Emergency VehiclesNoam Buckman, Wilko Schwartiing, Sertac Karaman, Daniela RusIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 paper / video / code / |
|
Generating Visibility-Aware Trajectories for Proactive and Cooperative Motion PlanningNoam Buckman, Alyssa Pierson, Sertac Karaman, Daniela RusIEEE International Conference on Robotics and Automation (ICRA), 2020 paper / video / |
|
Sharing is Caring: Socially-Compliant Autonomous Intersection NegotiationNoam Buckman, Alyssa Pierson, Wilko Schwarting, Sertac Karaman, Daniela RusIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 paper / video / code / |
|
Partial replanning for decentralized dynamic task allocationNoam Buckman, Han-Lim Choi, Jonathan P. HowAIAA Scitech: Guidance, Navigation, and Control, 2019 paper / |
|
Effects of Broadcasting Over Real Ad-Hoc Networks for Distributed Mobile RobotsNoam Buckman, Jonathan P. HowRobotics: Science and Systems (RSS) Workshop 'Robot Communication in the Wild: Meeting the Challenges of Real-world Systems', 2017 paper / |
Thesis
|
|
Semi-cooperative Planning for Mixed Human-Autonomous EnvironmentsNoam Buckman PhD Thesis, 2023 thesis / video / |
|
|
Decentralized task allocation for dynamic, time-sensitive tasksNoam Buckman Masters Thesis, 2018 thesis / link / |
Teaching |
|
AI & Automation for the Enterprise2021-2022Learning Facilitator / Subject Matter Expert for MIT’s Schwarzman College of Computing’s first online course offered through Emeritus. I ran live weekly office hour with students, discussing in-depth the technical aspects of autonomy and the impact on various industries. Topics covered included: natural language processing, industrial robotics, self-driving cars, and work of the future. |
|
2.001: Structural MechanicsSpring 2016We developed a new curriculum: mixing classic paper psets with online homework on the MITx platform, in addition to “discovery labs” where students could “discover” concepts such as strain & stress with hands-on examples. |
|
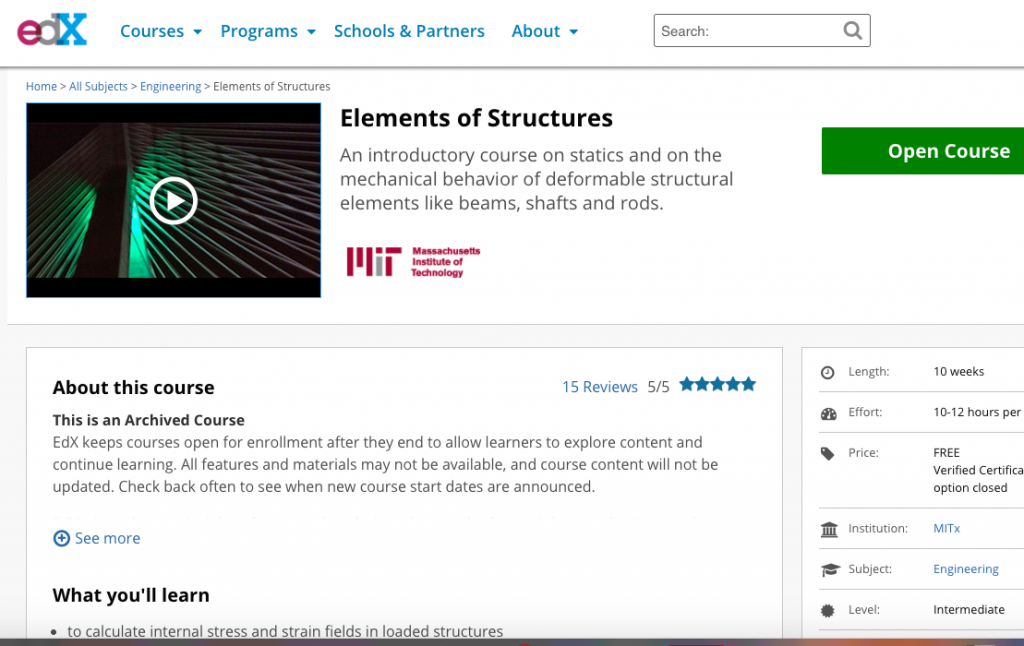
2.01x: Elements of Structures2014-2016During my 4 years of undergrad MIT, I worked with Simona Socrate to develop 2.01x. My involvement has varied over time, beginning with editing content for bugs/errors to managing a team of editors to moderating discussion forms. I even began making my own videos that walk through common problems and methodologies used in the course. |
Class Projects |
|
Review: Adversarial Attacks on Deep Reinforcement Learning6.s979: Deployable Machine LearningSpring 2019 |
|
Task Prediction from Human Trajectories using Deep Learning6.867: Machine LearningSpring 2019 |
|
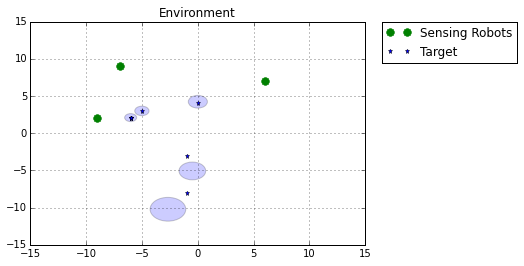
Multiagent Active Noisy Sensing and Information-Theoretic Control6.441: Information TheorySpring 2017 |
|
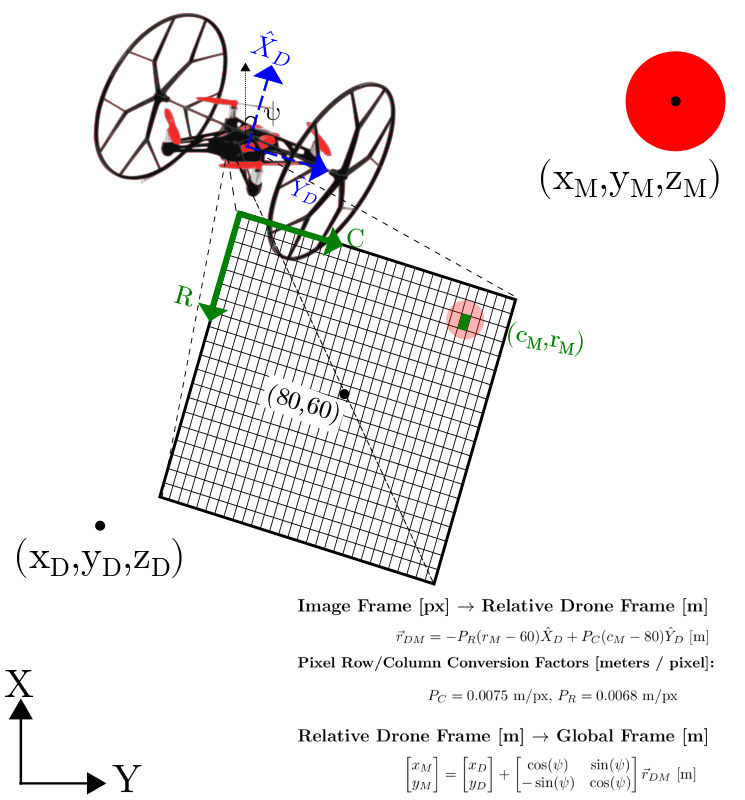
Target Tracking & Estimation with Parrot UAV16.31: Feedback Control DesignFall 2016 video / |
|
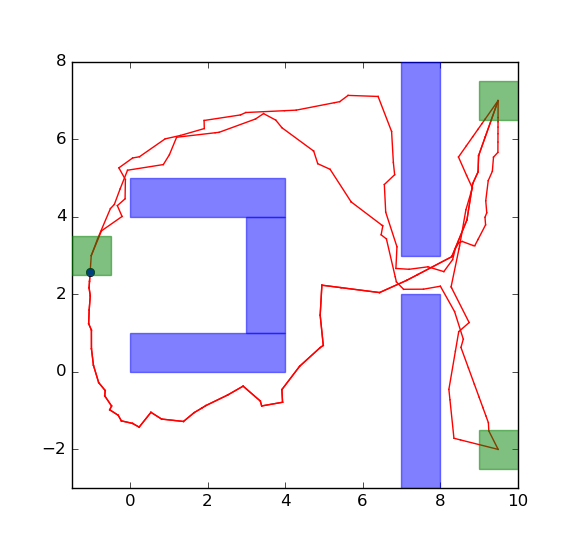
Final Projects: RRT*, RMPL, Constraint Programming, MIPL16.413: Introduction to Artificial IntelligenceFall 2016 |
|
Intersection Traffic Light Coordination2.166: Duckietown (Self-Driving Cars)Spring 2016 |
|
Design and source code from Jon Barron's website Jekyll source code from Leonid Keselman's Jekyll fork. |