|
iSAM
|


|
|
iSAM
|
|
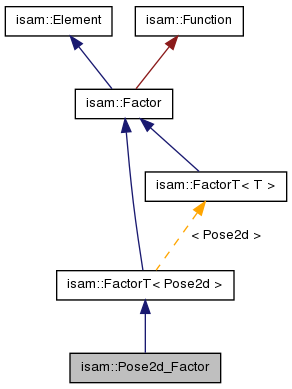
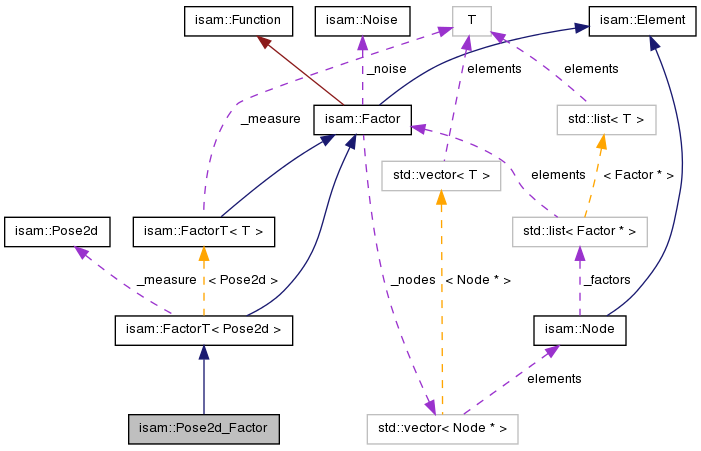
#include <slam2d.h>
Public Member Functions | |
| Pose2d_Factor (Pose2d_Node *pose, const Pose2d &prior, const Noise &noise) | |
| void | initialize () |
| Eigen::VectorXd | basic_error (Selector s=LINPOINT) const |
| Jacobian | jacobian () |
| isam::Pose2d_Factor::Pose2d_Factor | ( | Pose2d_Node * | pose, |
| const Pose2d & | prior, | ||
| const Noise & | noise | ||
| ) | [inline] |
 1.7.6.1
1.7.6.1