List of all members.
Detailed Description
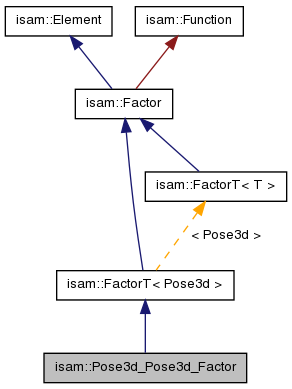
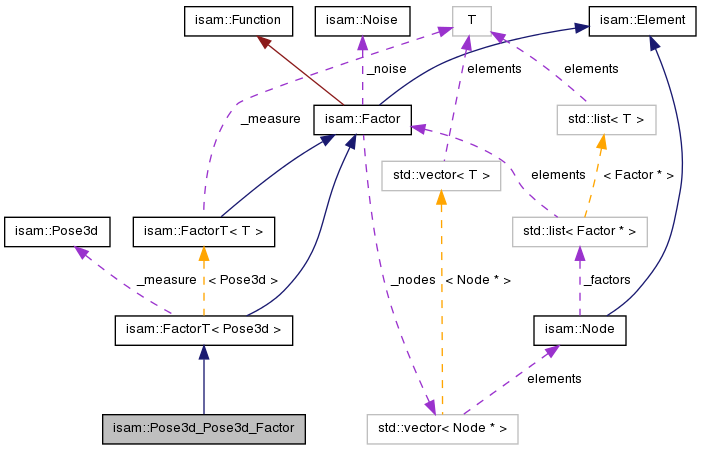
Definition at line 91 of file slam3d.h.
Constructor & Destructor Documentation
Constructor.
- Parameters:
-
| pose1 | The pose from which the measurement starts. |
| pose2 | The pose to which the measurement extends. |
| measure | The relative measurement from pose1 to pose2 (pose2 in pose1's frame). |
| noise | The 6x6 square root information matrix (upper triangular). |
| anchor1 | Optional anchor node for trajectory to which pose1 belongs to. |
| anchor2 | Optional anchor node for trajectory to which pose2 belongs to. |
Definition at line 106 of file slam3d.h.
The documentation for this class was generated from the following file:


 1.7.6.1
1.7.6.1