Software
This is a web based assistant is designed to help communters optimize their transit trips in Boston. This tool is constructed based on my ICAPS paper on temporal relaxation with uncertain duration. Give it a try and let me know if you have any comments, questions and suggestions.
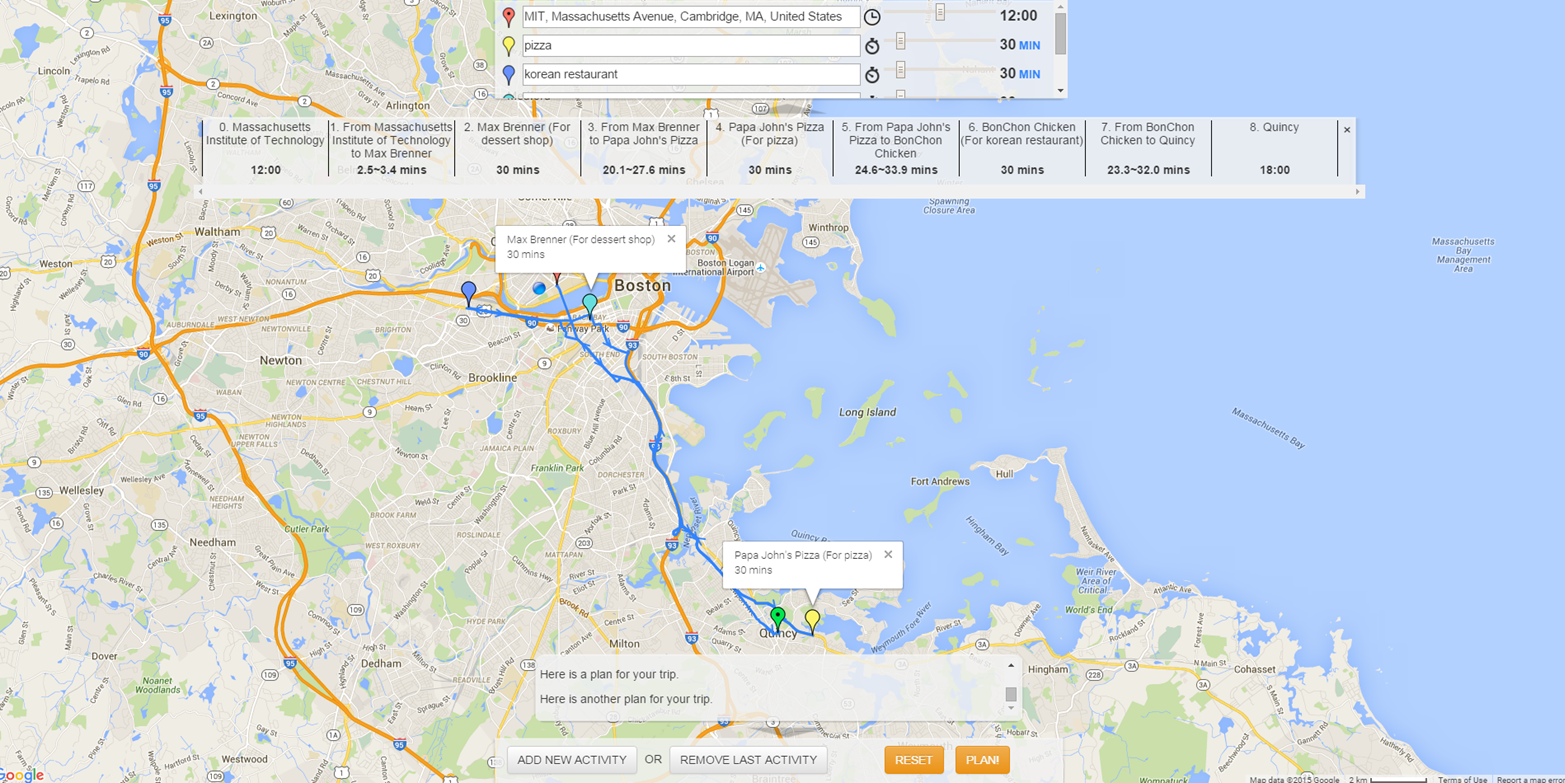
Uhura: A Multi-destination Trip Planner
UPDATE: You may now interact with Uhura through its new Amazon Echo interface! Checkout the skill from https://github.com/yu-peng/uhura-echo-interface and test it with your Echo.
This is an optimizer implemented based on the paper "Continuously Relaxing Over-constrained Conditional Temporal Problems through Generalized Conflict Learning and Resolution" and "Resolving Uncontrollable Conditional Temporal Problems using Continuous Relaxations" for temporal constraint satisfaction/optimization problems.
The algorithm can be found on GitHub: https://github.com/yu-peng/cdru (Thanks to Jing Cui and Szymon Sidor for their help on the implementation).
The slides I presented at IJCAI-13 can be found here. It provides an overview of the approach used by BCDR (an earlier version of CDRU based on consistency) and the design of experiments.
Another set of slides I prepared that explains how CDRU handles the relaxation/tightening of problems with uncertain durations, and its applications to several transportation projects (link).
Finally, you may find a set of test cases at tests.zip. They are constructed from the domains of transit, daily activity, and deep sea exploration planning.
This software may not be redistributed, and can only be retained and used with the explicit written consent of the author, Peng Yu. This software is made available as is; no guarantee is provided with respect to performance or correct behavior. This software may only be used for non-commercial, non-profit, research activities. Copyright (c) 2013-2016 Peng Yu.
This is a program for filtering point of interests based on simple temporal and/or spatial descriptions, such as 'near', 'between' and 'on my way to'. For example, the follow figure demonstrates how this reasoner identifies the pizza restaurants that are 'on my way to' the San Jose airport from Stanford. This reasoner builds upon the path planner Graphhopper and street data from OpenStreetMap. You may find the source code in my GitHub repo.
This is a program for translating English inputs to languages used by automated planners. It takes in English and translates the commands or requirements in it into a planning language, by extracting relevant planning information fromthe original input phrase. The output can be in either Reactive Model-based Programming Language (RMPL) or the Planning Domain Definition Language (PDDL). This translator builds upon the Stanford English Parser and GraphPlan. You may download the source code from my GitHub repo.
Commuter Advisor
This is a web based assistant is designed to help communters optimize their transit trips in Boston. This tool is constructed based on my ICAPS paper on temporal relaxation with uncertain duration. Give it a try and let me know if you have any comments, questions and suggestions.
UPDATE: You may now interact with Uhura through its new Amazon Echo interface! Checkout the skill from https://github.com/yu-peng/uhura-echo-interface and test it with your Echo.
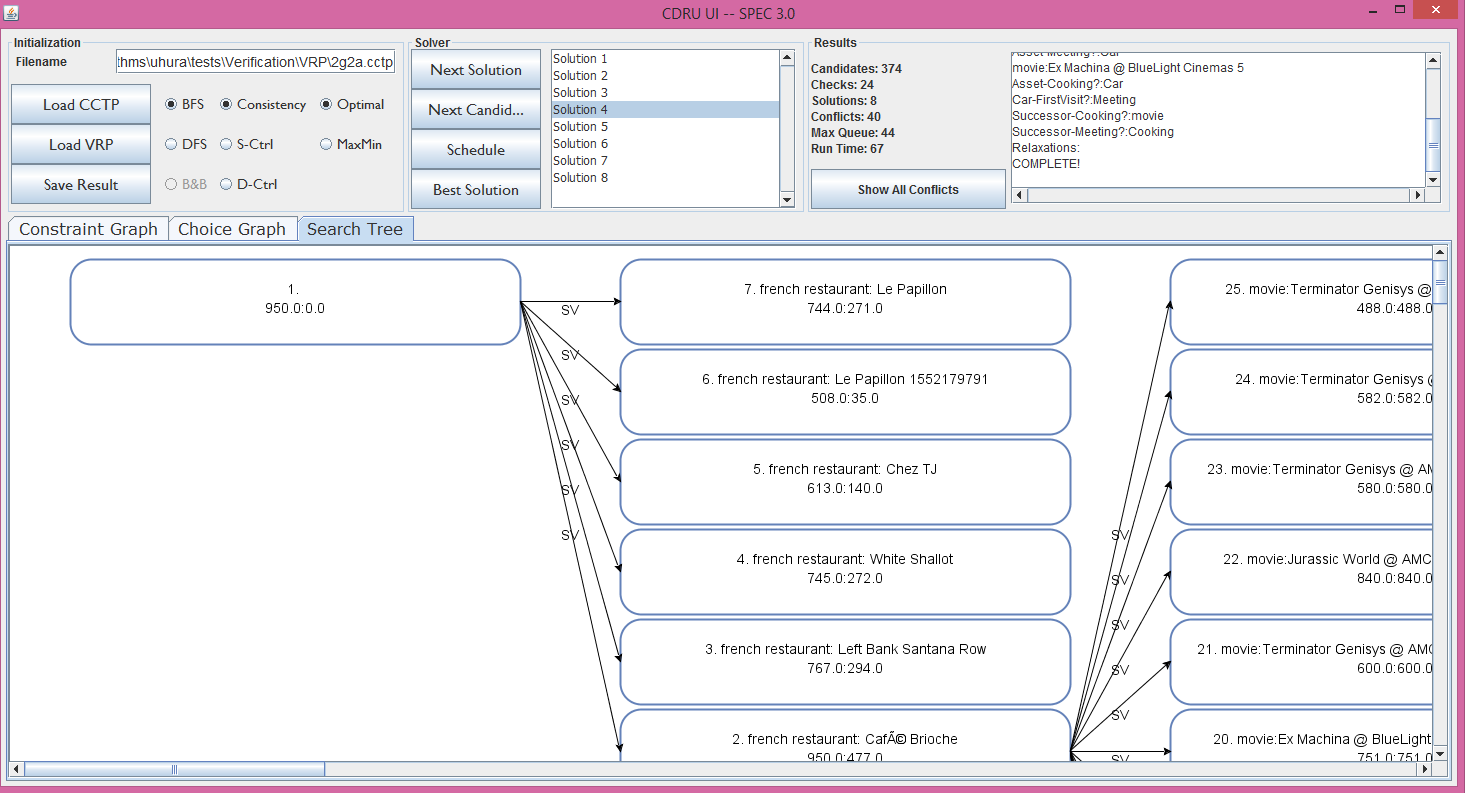
Conflict-Directed Relaxation with Uncertainty (CDRU)
This is an optimizer implemented based on the paper "Continuously Relaxing Over-constrained Conditional Temporal Problems through Generalized Conflict Learning and Resolution" and "Resolving Uncontrollable Conditional Temporal Problems using Continuous Relaxations" for temporal constraint satisfaction/optimization problems.
The algorithm can be found on GitHub: https://github.com/yu-peng/cdru (Thanks to Jing Cui and Szymon Sidor for their help on the implementation).
The slides I presented at IJCAI-13 can be found here. It provides an overview of the approach used by BCDR (an earlier version of CDRU based on consistency) and the design of experiments.
Another set of slides I prepared that explains how CDRU handles the relaxation/tightening of problems with uncertain durations, and its applications to several transportation projects (link).
Finally, you may find a set of test cases at tests.zip. They are constructed from the domains of transit, daily activity, and deep sea exploration planning.
This software may not be redistributed, and can only be retained and used with the explicit written consent of the author, Peng Yu. This software is made available as is; no guarantee is provided with respect to performance or correct behavior. This software may only be used for non-commercial, non-profit, research activities. Copyright (c) 2013-2016 Peng Yu.
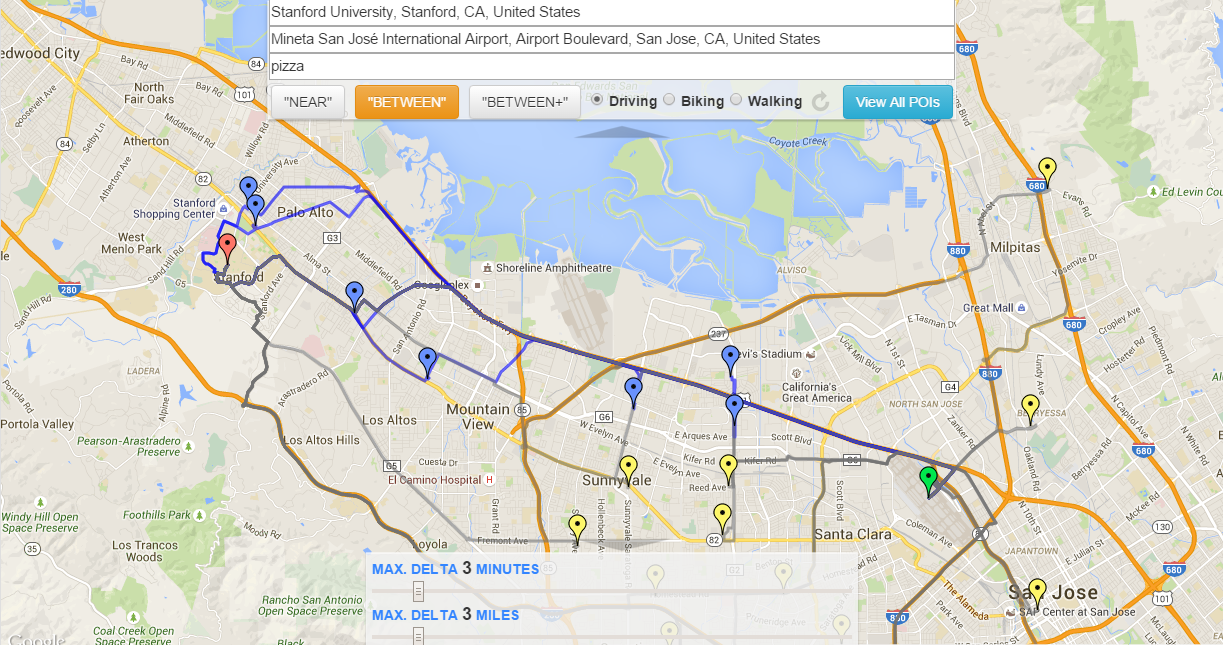
Simple Temporal and Spatial Reasoner
This is a program for filtering point of interests based on simple temporal and/or spatial descriptions, such as 'near', 'between' and 'on my way to'. For example, the follow figure demonstrates how this reasoner identifies the pizza restaurants that are 'on my way to' the San Jose airport from Stanford. This reasoner builds upon the path planner Graphhopper and street data from OpenStreetMap. You may find the source code in my GitHub repo.
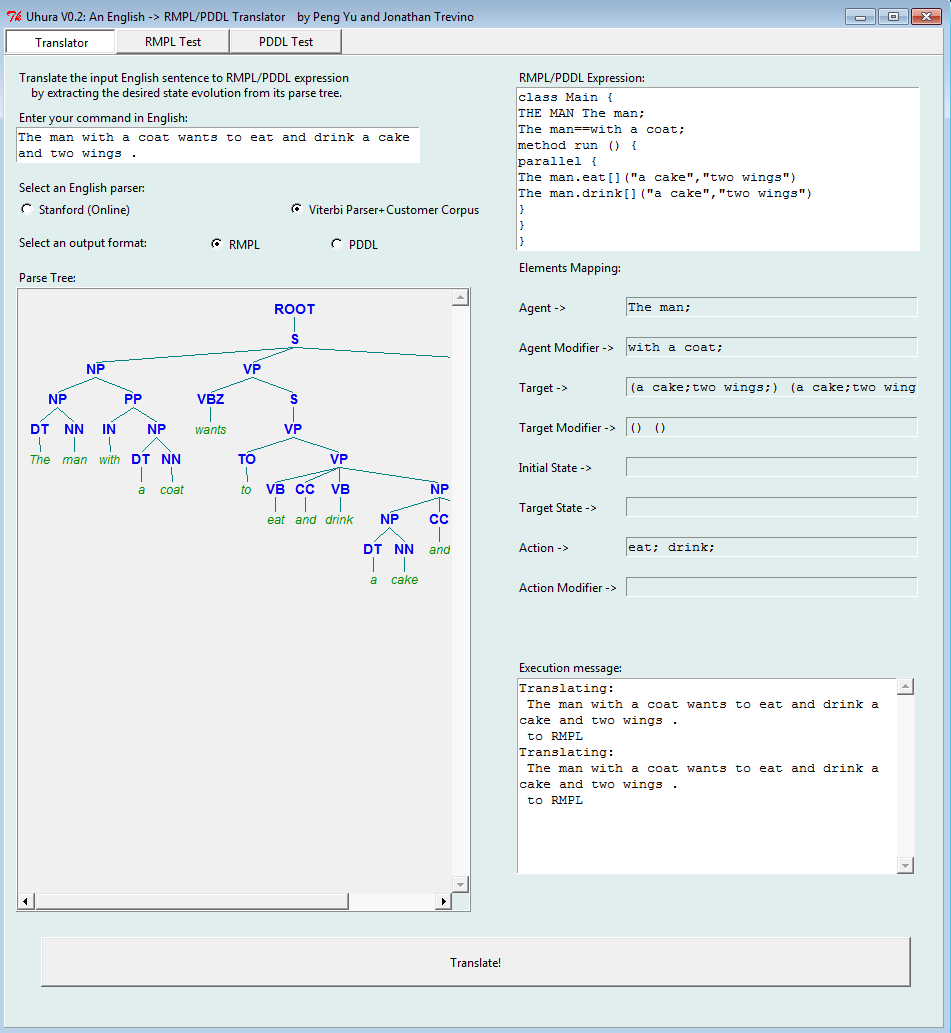
English to Planning Language (PDDL and RMPL) Translator
This is a program for translating English inputs to languages used by automated planners. It takes in English and translates the commands or requirements in it into a planning language, by extracting relevant planning information fromthe original input phrase. The output can be in either Reactive Model-based Programming Language (RMPL) or the Planning Domain Definition Language (PDDL). This translator builds upon the Stanford English Parser and GraphPlan. You may download the source code from my GitHub repo.