

About Me
I am a Research Scientist in the Machine Perception team at Google as of May 2016. Prior to that, I was a Postdoctoral Researcher in Computer Science and Artificial Intelligence Laboratory (CSAIL) at MIT, where I was affiliated with the Computer Vision and the Sensing, Learning, Inference labs, and privileged to work with Profs. Bill Freeman and John Fisher.
I am broadly interested in Artificial Intelligence. Specifically my research lies at the intersection of Computer Vision, Machine Learning, and Optimization. My work is often guided by mathematical principles. I am also the admin of the facebook page on Nonconvex Optimization.
I graduated from University of Illinois at Urbana-Champaign (UIUC) with a PhD in Computer Science, where I was fortunate to be supervised by Prof. Yi Ma. My dissertation is titled Optimization by Gaussian Smoothing with Application to Geometric Alignment.
News
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Selected Publications
|
|
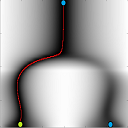
Anima Anandkumar, Yuan Deng, Rong Ge, Hossein Mobahi (authors ordered alphabetically). Conference On Learning Theory (COLT), 2017.We analyze homotopy continuation for global optimization of nonconvex functions. In particular, we prove global convergence of the homotopy method for tensor PCA problem in the "high noise" regime. The signal-to-noise requirement for our algorithm is tight; it matches the recovery guarantee for the best degree-4 sum-of-squares algorithm. |

|
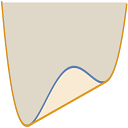
Hossein Mobahi. arXiv:1601.04114 [cs.LG], January 2016.Diffusion theory can justify some of the common techniques used in deep learning, and also lead to much faster training compared to SGD. The arXiv version may be lagged in updates. Please use the local copy (linked as "Paper") for the most recent version. |
|
|
Charlie Frogner, Chiyuan Zhang, Hossein Mobahi, Mauricio Araya-Polo, Tomaso Poggio. Neural Information Processing Systems (NIPS), 2015.Multi-label learning via Wasserstein distance with efficient computation. Improved results for tag prediction problem with Yahoo Flickr dataset. |
|
|
Tianfan Xue, Hossein Mobahi, Fredo Durand, William T. Freeman. Int. Conf. on Computer Vision and Pattern Recognition (CVPR), 2015.Extending the theory of the aperture problem -- fundamental in motion estimation -- to more challenging setup involving refraction. |
|
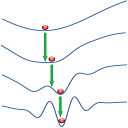
Hossein Mobahi, John W. Fisher III. 29th Conference on Artificial Intelligence (AAAI), 2015.For the first time, performance guarantees are provided for optimization by continuation by combining regularization theory and differential equations. |
|
Hossein Mobahi, John W. Fisher III. Energy Minimization Method in Computer Vision and Pattern Recognition (EMMCVPR), 2015.For the first time, an optimal homotopy construction for optimization by continuation is derived via partial differential equations. |

|
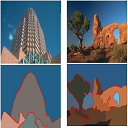
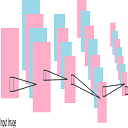
Hossein Mobahi, Ce Liu, William T. Freeman. Int. Conf. on Computer Vision and Pattern Recognition (CVPR), 2014.Discovering the space of variations within an image set by nonlinear decomposition of images into low-dimensional components. Results on image morphing, motion synthesis, and navigation through images are presented. |
|
Hossein Mobahi, C. Lawrence Zitnick, Yi Ma. Int. Conf. on Computer Vision and Pattern Recognition (CVPR), 2012.Mathematical derivation of optimal blur operators for image alignment. The resulted blur is spatilly varying like in Retina, unlike the widely used uniform blur in multiresolution methods. |
|
Hossein Mobahi, Shankar R. Rao, Allen Y. Yang, S. Shankar Sastry, Yi Ma. International Journal of Computer Vision (IJCV), 2011.State of the art segmentation result on standard benchmark dataset via Gaussian source coding of information theory. |
|
Hossein Mobahi, Ronan Collobert, Jason Weston. Int. Conf. on Machine Learning (ICML), 2009.One of the first papers on deep learning from video to improve recognition. This exploits the naturally existing temporal coherence among successive video frames. |
|
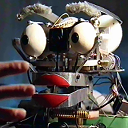
Hossein Mobahi. Bachelors Degree Final Project.Showing how an intelligent interactive robot face can be built from scratch. The electronic and hardware is built from basic elements and the software is coded up in c and includes various modules including neural networks and PID control. The robot can detect faces and hands, and follow them by adjusting its gaze and showing emotions via motorized mouth and eyebrows. |
Here you can find the complete list of pubications.