News
02/2026: Refinery is accepted to ICRA 2026.
11/2025: Neural Robot Dynamics is covered by Two Minute Papers.
09/2025: We release the code for Neural Robot Dynamics (CoRL 2025).
08/2025: Neural Robot Dynamics and VT-Refine are accepted to CoRL 2025.
07/2025: One paper is accepted to IROS 2025.
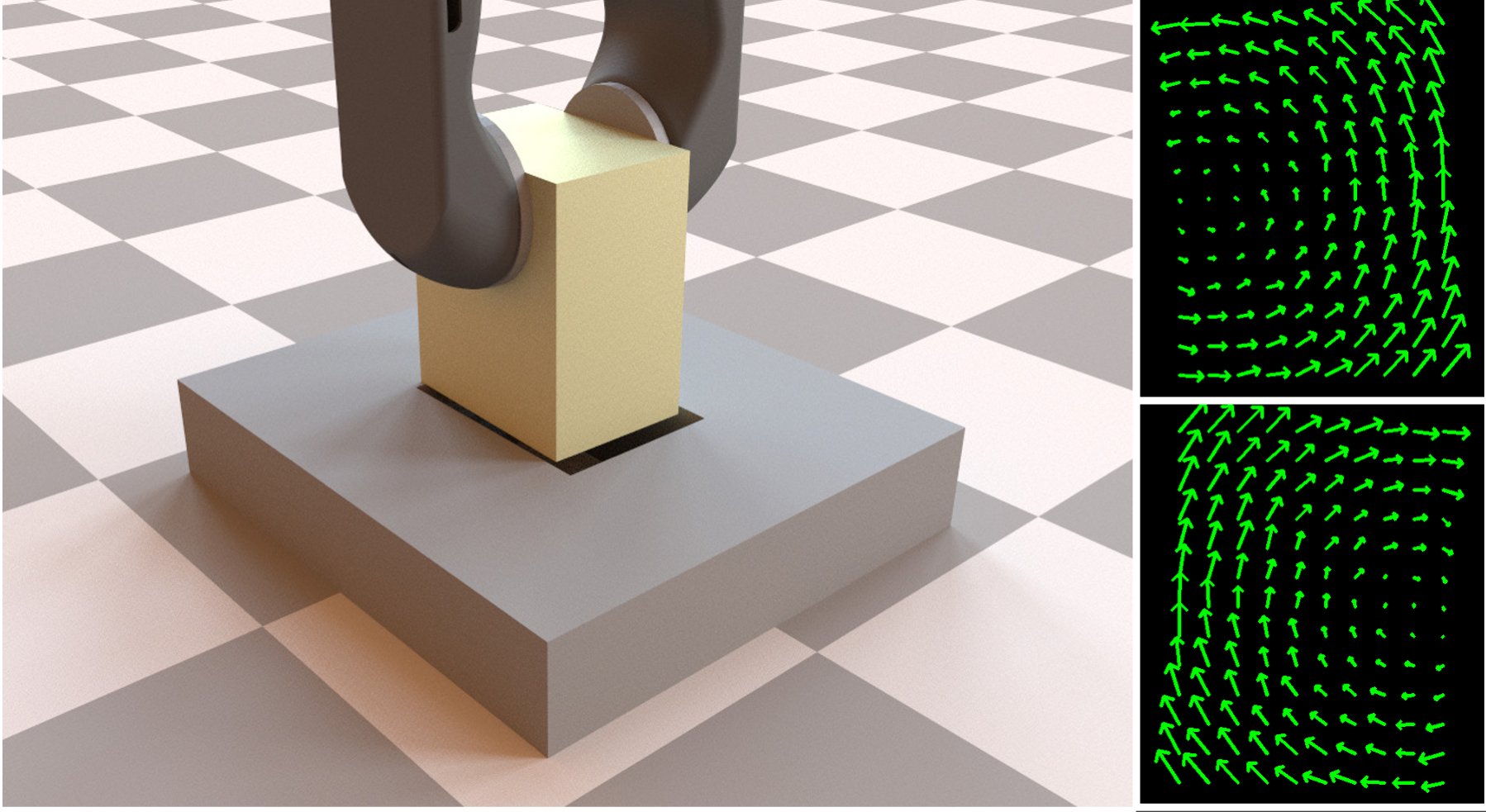
01/2025: TacSL is accepted to T-RO.
05/2024: One paper accepted to ICML 2024 and two papers accepted to RSS 2024.
08/2024: One paper accepted to CoRL 2023 (Oral).
01/2024: We release the code for our Tactile Simulation Paper (CoRL 2022).
09/2023: RVT is accepted to CoRL 2023.
10/2022: SHAC is covered by Two Minute Papers.
10/2022: I started as a Research Scientist at Nvidia Seattle Robotics Lab.
09/2022: Our work on differentiable tactile simulation has been accepted by CoRL 2022.
08/2022: I successfully defended my Ph.D. thesis and obtained the Ph.D. degree.
08/2022: Our work on general assembly path planning has been conditionally accepted by SIGGRAPH Asia 2022 (Journal Track).
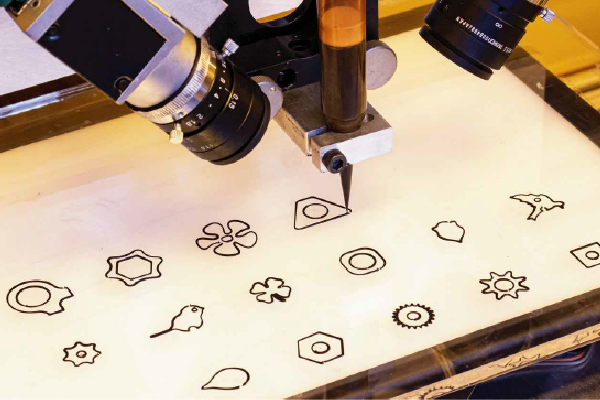
08/2022: Our work about 3d printing control by reinforcement learning is covered by MIT News.
07/2022: We officially release the code of SHAC, please check it out.
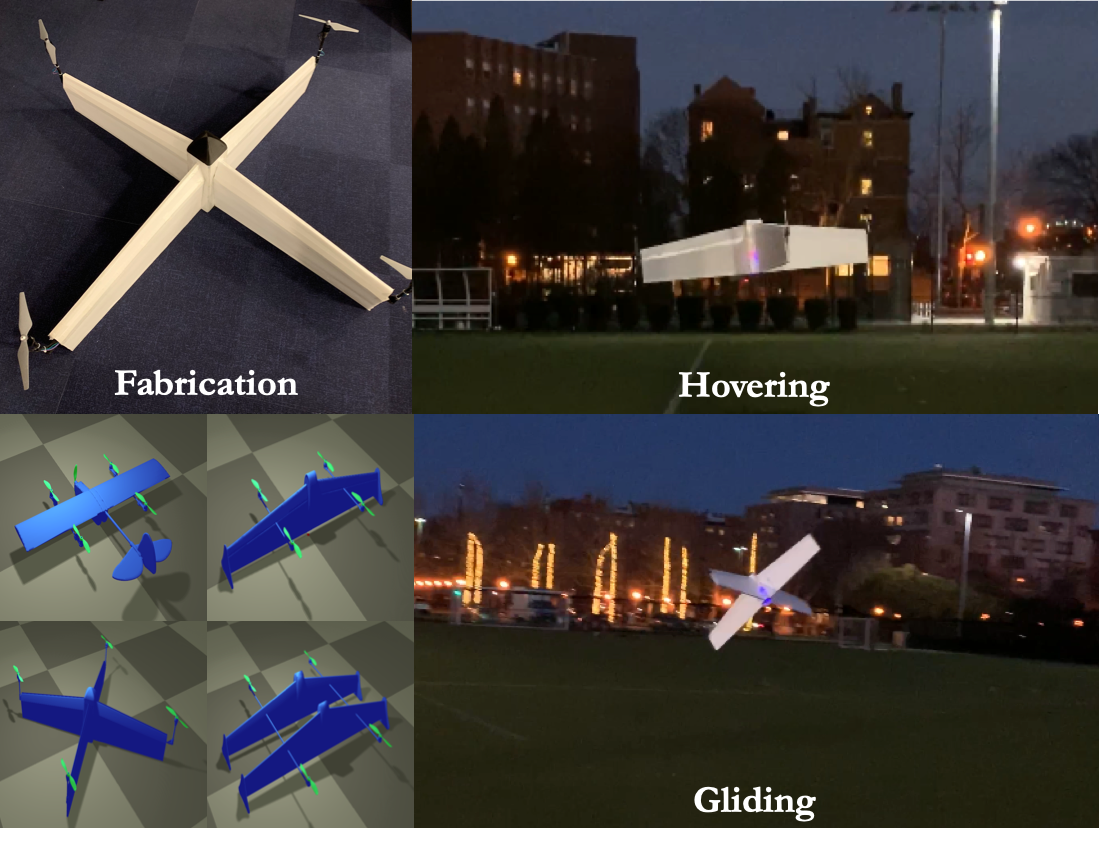
06/2022: Our work about UAV grammar for UAV co-design is accepted by IROS 2022.
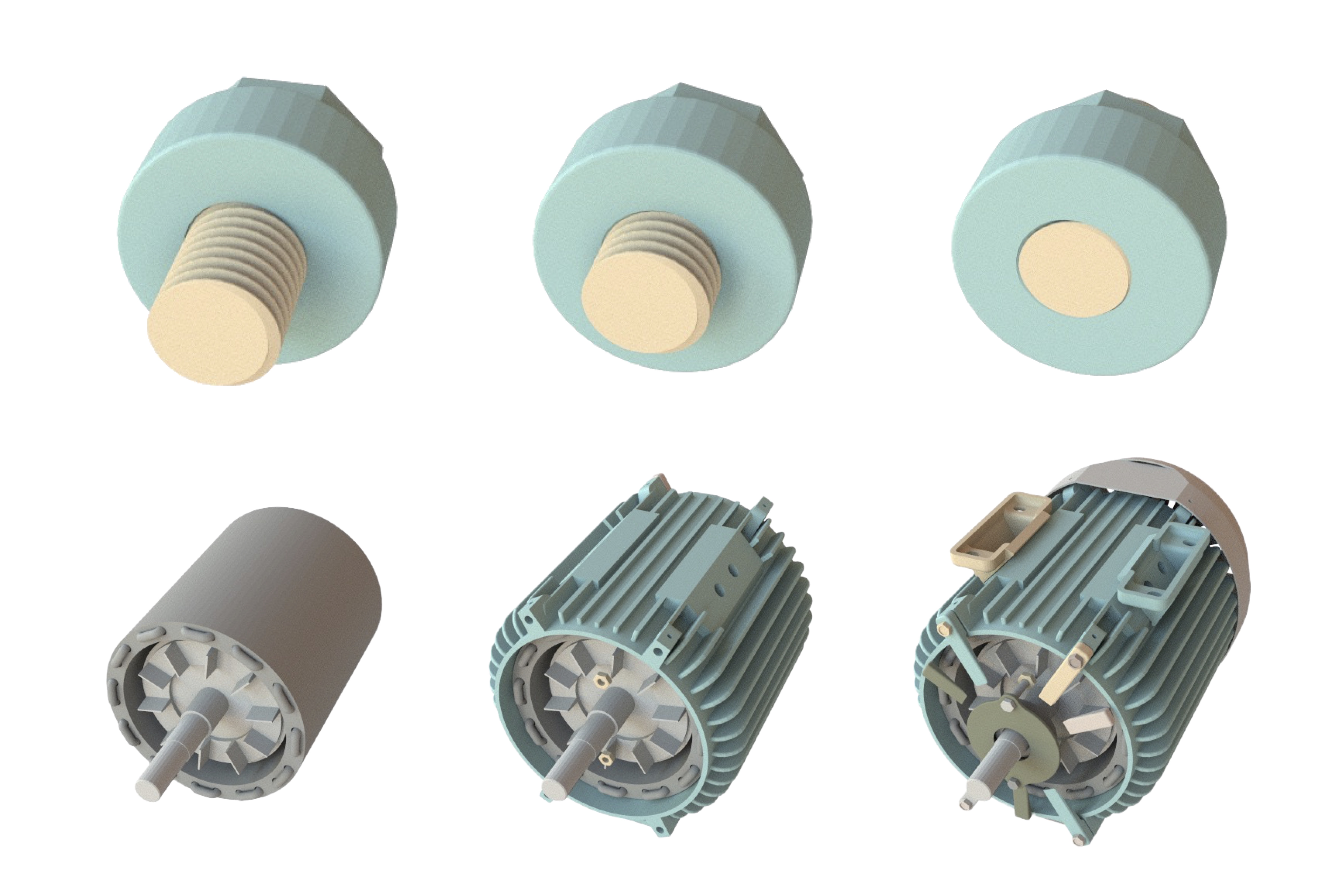
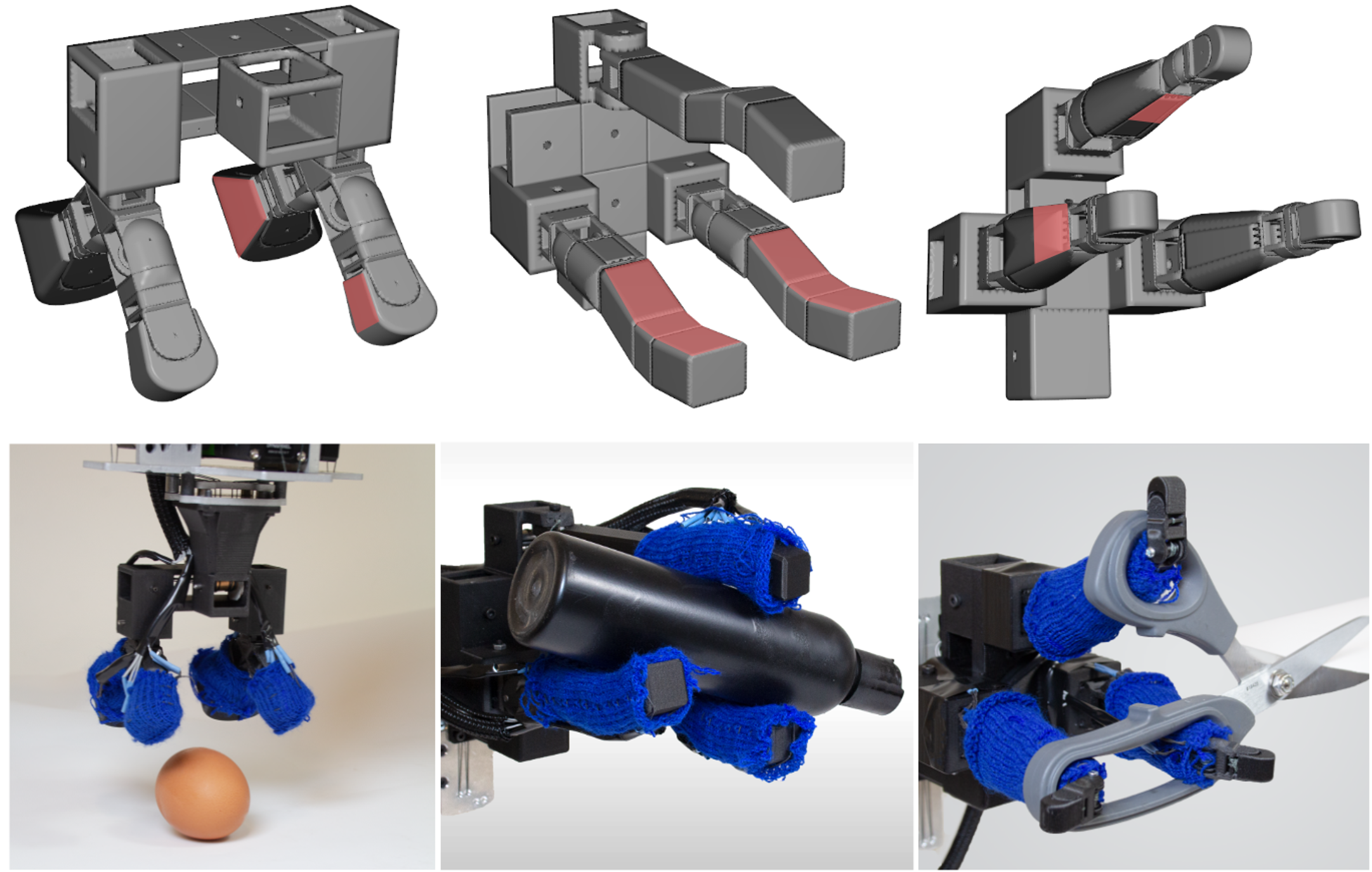
05/2022: Our tactile manipulator design pipeline is covered by MIT News.
03/2022: A paper is conditionally accepted by SIGGRAPH 2022 (journal track).
02/2022: DiffCloth is accepted by TOG.
01/2022: Two papers are accepeted by ICRA 2022.
01/2022: Our work on using differentiable simulation for policy learning on complex control tasks is accepted by ICLR 2022.
11/2021: Our work on challenging in-hand re-orientation wins Best Paper Award at CoRL 2021.
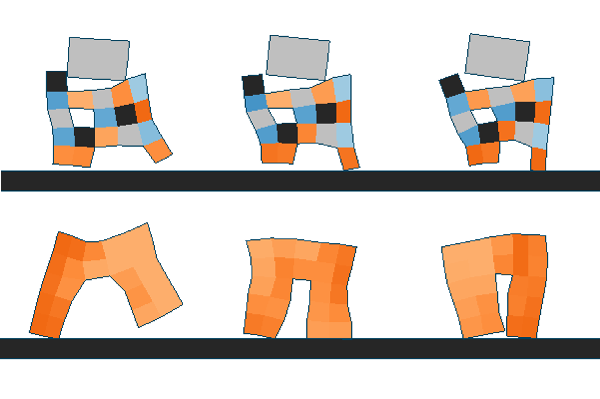
09/2021: Our work EvoGym, a large-scale co-design benchmark is accepted by NeurIPS 2021.
09/2021: Our work on challenging in-hand manipulation is accepeted as an oral paper (6.5%) by CoRL 2021.
06/2021: Join NVIDIA simulation team as a research intern.
05/2021: Our work about differentiable simulation for robot co-design is accepted by RSS 2021.
03/2021: A paper on multi-objective robot topology search is accepted by ICRA 2021.
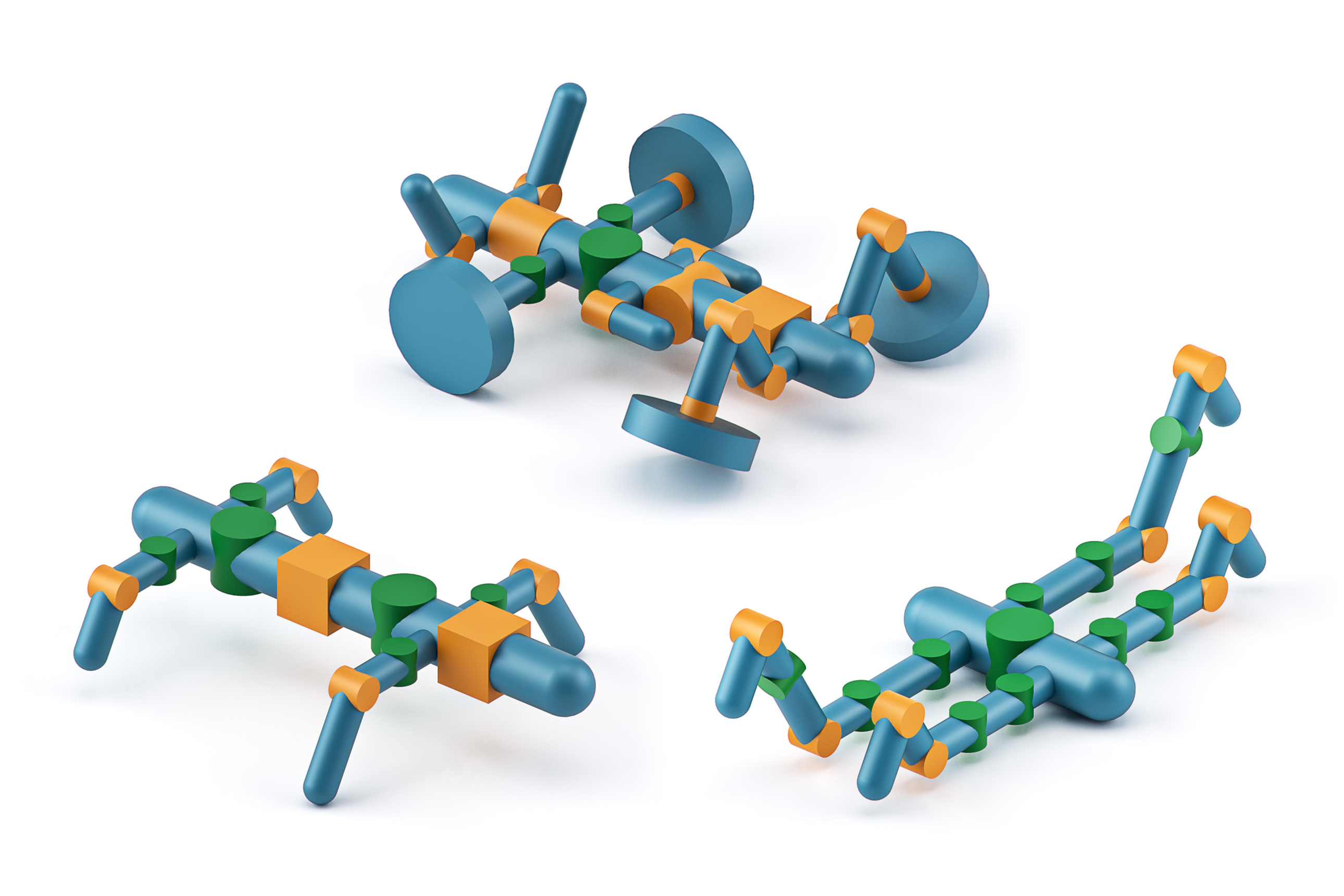
11/2020: RoboGrammar is covered by MIT News.
more