Related Publications:
Goretkin, G., Perez, A., Platt, R., Konidaris, G.,
“Optimal Sampling-Based Planning for Linear-Quadratic Kinodynamic Systems,”
in IEEE International Conference on Robotics and Automation (ICRA), 2013.[Pdf][Bibtex]
Perez, A., Platt, R., Konidaris, G., Kaelbling, L., Lozano-Perez, T.,
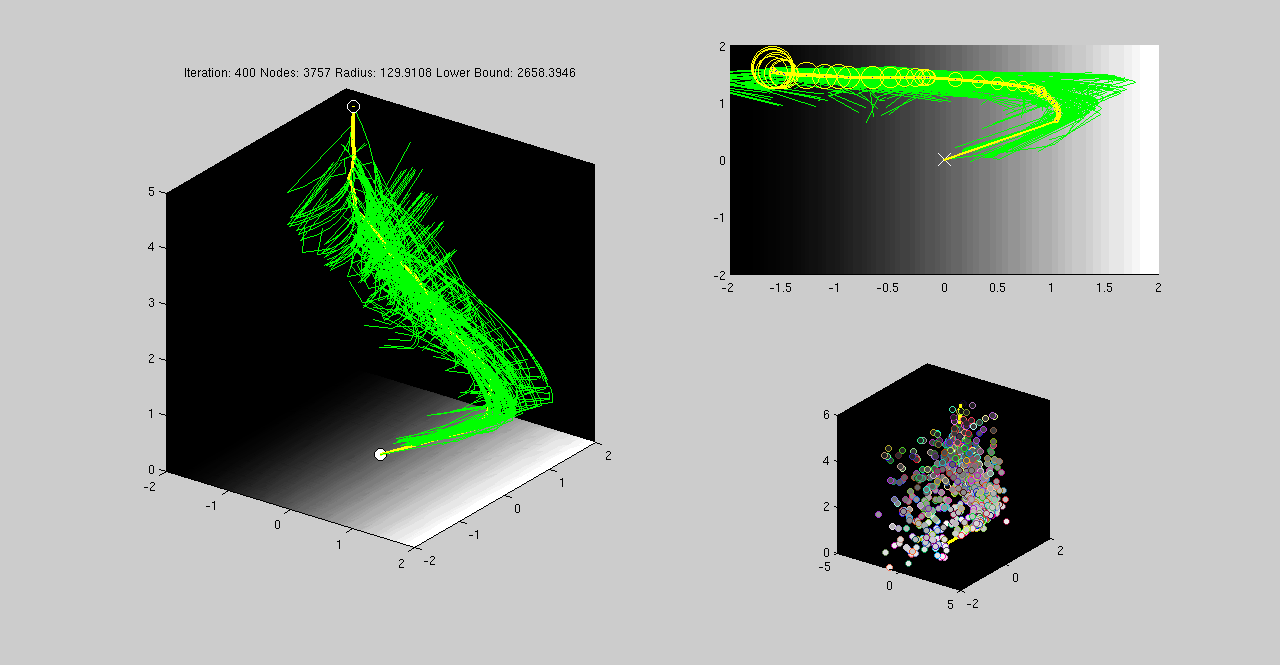
“LQR-RRT*: Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics,”
in IEEE International Conference on Robotics and Automation (ICRA), 2012. [Pdf][Bibtex]
[Light-Dark][Video][ICRA Slides]
[Astrobee]
Related Publication:
Perez, A., Karaman, S., Shkolnik, A., Frazzoli E., Teller, S. and Walter, M.,
“Asymptotically-optimal Manipulation Planning using Incremental Sampling-based Algorithms,”
in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2011. [Pdf][Bibtex]
[Video][Page][Workshop][IROS Slides]
Related Publication:
Karaman, S., Walter, M., Perez, A., Frazzoli, E., and Teller, S.,
“Anytime Motion Planning using the RRT*,”
in IEEE International Conference on Robotics and Automation (ICRA), 2011. [Pdf][Bibtex]
[Video][Page]
Related Publication:
Jordan, M., Perez, A.,
“Optimal Bidirectional Rapidly-Exploring Random Trees,” [CSAIL Tech Report MIT-CSAIL-TR-2013-021][Bibtex]
[Page]
Related Publication:
Perez, A.,
“On Randomized Path Coverage of Configuration Spaces,” [CSAIL Tech Report MIT-CSAIL-TR-2013-027][Bibtex]
{kind=link}